نگاه کلی به دستگاه
دستگاه از سه زیرسیستم اصلی تشکیل شده که در تصویر کنار، با همان شمارههای حکشده روی بدنه مشخص شدهاند.
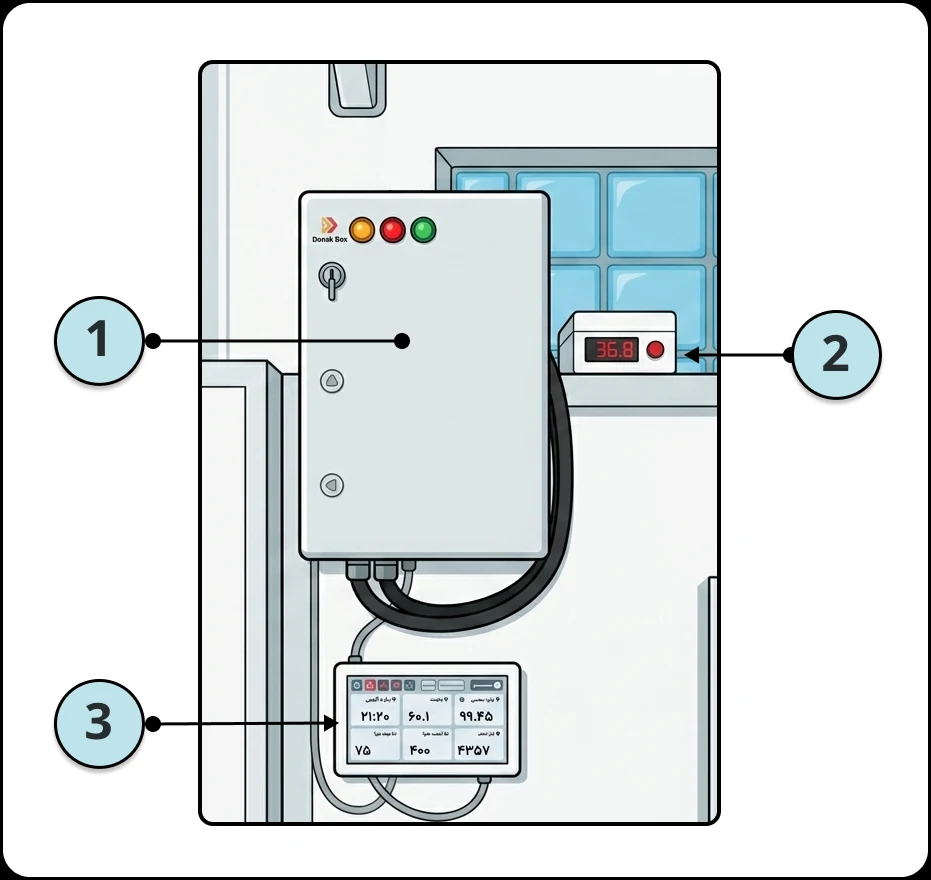
تابلو برق
محفظه برد کنترلر و ماژولهای فرمان SSR؛ محل ورود برق شهر و خروجی فرمان به هیترها، فن و سایر تجهیزات.
صفحه نمایش
واسط کاربری دستگاه برای مشاهده وضعیت لحظهای، تنظیم دما و رطوبت و کنترل دستی تجهیزات.
محافظ (ترموستات)
حفاظت مستقل در برابر افزایش بیش از حد دما، مستقل از عملکرد کنترلر اصلی.
نکته طراحی
تمامی ماژولهای SSR (رله حالت جامد) بهصورت اختصاصی طراحی و ساخته شدهاند و دقیقاً متناسب با نیاز جریانی این دستگاهاند؛ از جایگزینی آنها با ماژولهای عمومی بازار خودداری کنید.
برد کنترلر و ماژولها
برد کنترلر تمامی فرمانها را پردازش میکند. شمارههای تصویر مطابق برچسبهای چاپشده روی خود برد هستند.
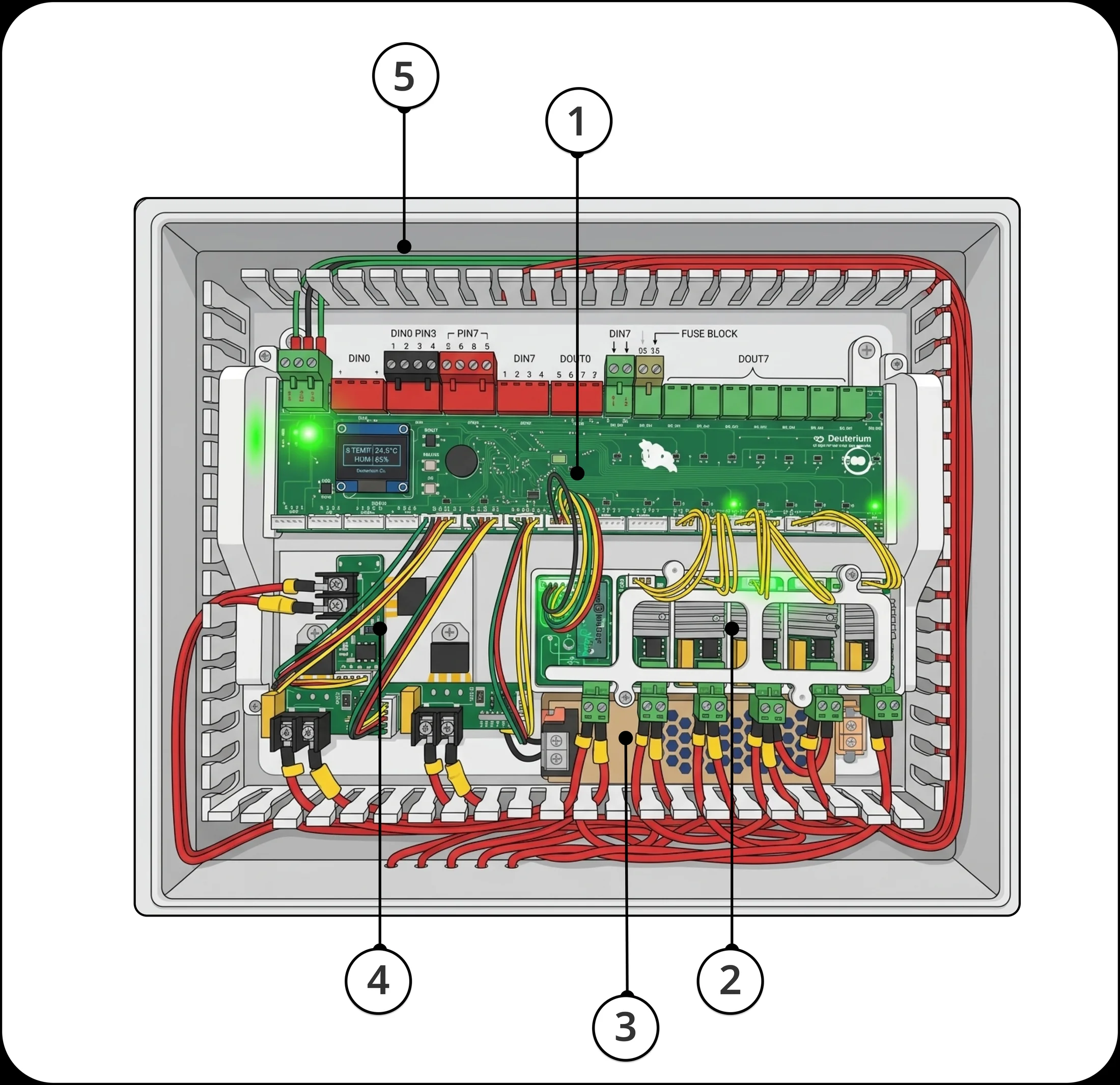
- کنترل سه هیتر مستقل
- اندازهگیری جریان مصرفی هیترها و فن
- کنترل دقیق دما و رطوبت
- سیستم هشدار و آژیر هوشمند
نقشه سیمکشی و اتصالات
اتصال صحیح سیمها یکی از حساسترین مراحل نصب است. رنگ هر گروه در نقشه با رنگ برچسب زیر مطابقت دارد.
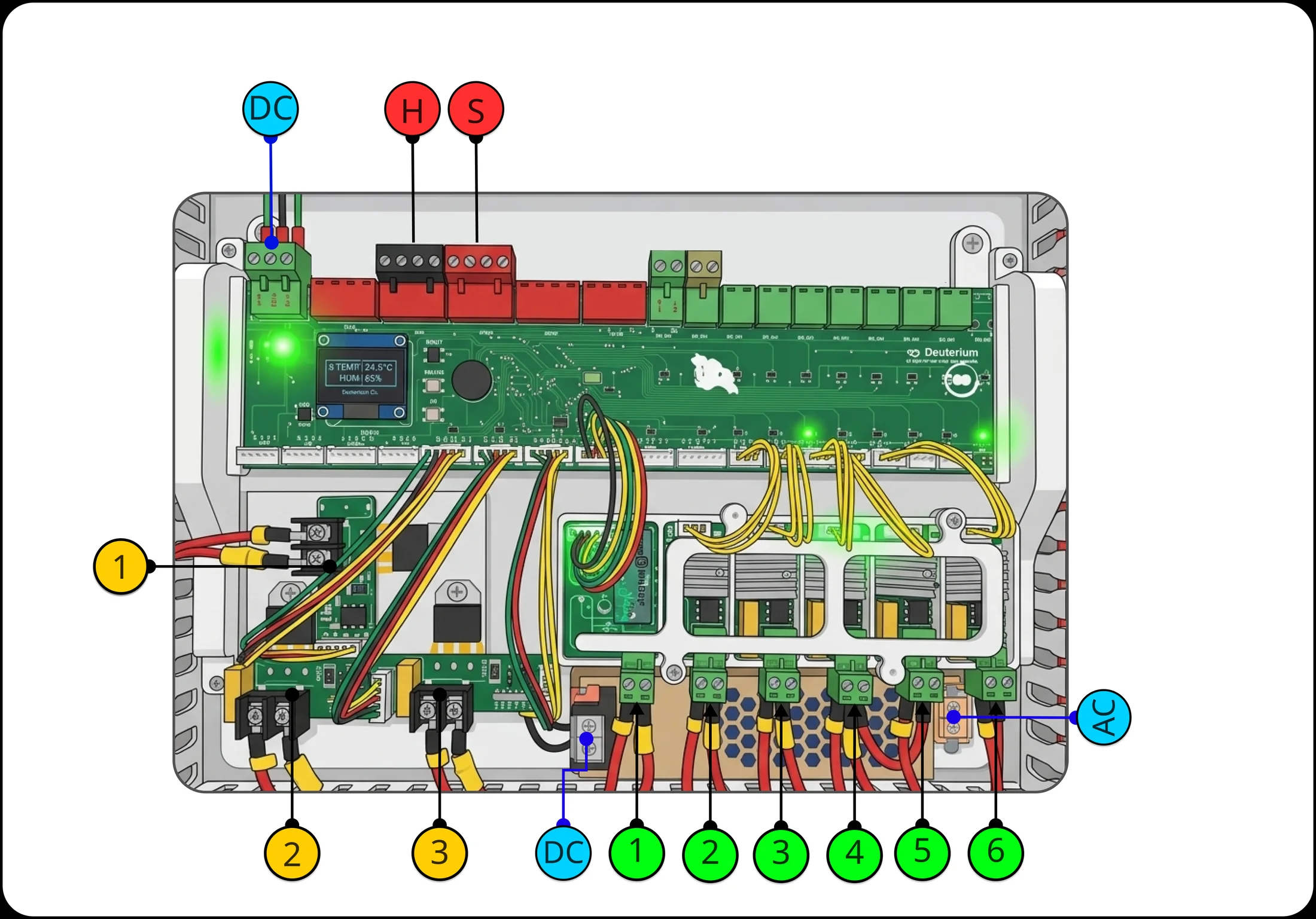
ماژولهای هیتر
کانکتورهای تغذیه برد
ماژولهای کنترلی عمومی
نکات مهم قبل از اتصال
- آژیر مورد استفاده حتماً باید از نوع AC باشد.
- خروجیهای کنترل هیتر و فن دارای قابلیت اندازهگیری جریان (Current Measurement) هستند.
- از سیم با سطح مقطع مناسب و متناسب با جریان هر خروجی استفاده شود.
- پیش از نصب و روشن کردن دستگاه، از صحت تمامی اتصالات و محکم بودن ترمینالها اطمینان حاصل کنید.
صفحه نمایش و منوها
صفحه نمایش واسط اصلی کاربر با دستگاه است. در ادامه هر منو با کاربرد آن معرفی شده است.

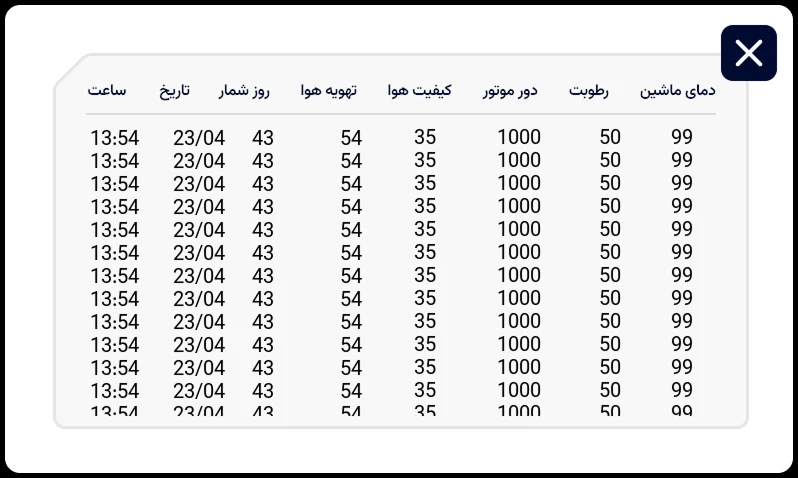
نمایش لحظهای دما، رطوبت، وضعیت هیترها و روز جاری چرخه تفریخ.

ورودی اصلی به زیرمنوهای دما، رطوبت، کالیبراسیون و هشدار.

تعیین دمای هدف و محدوده هشدار دمایی برای مرحله جاری جوجهکشی.

تعیین رطوبت هدف و محدوده مجاز نوسان رطوبت محیط.
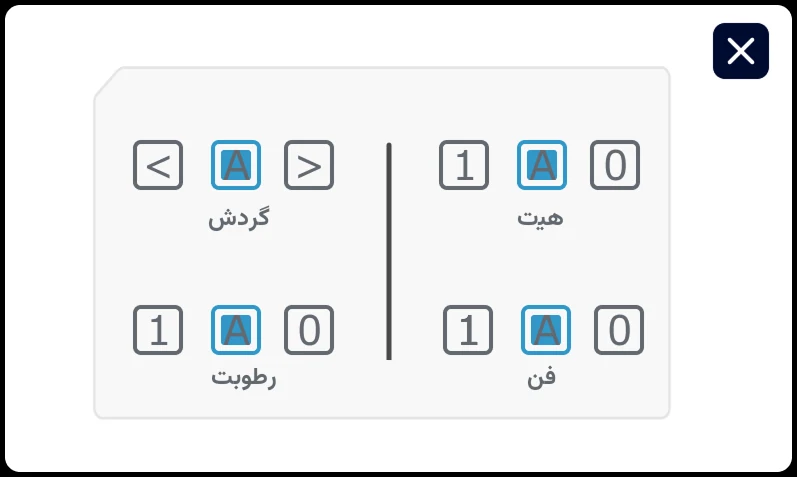
روشن و خاموشکردن دستی هیتر، فن، چرخش و دریچه برای تست و عیبیابی.
برنامه دمایی پیشفرض برای هر روز از دوره جوجهکشی.

اصلاح دقیق مقادیر خواندهشده سنسورهای دما و رطوبت.

تعیین حساسیت و بازه فعالشدن هشدارهای دما و رطوبت.
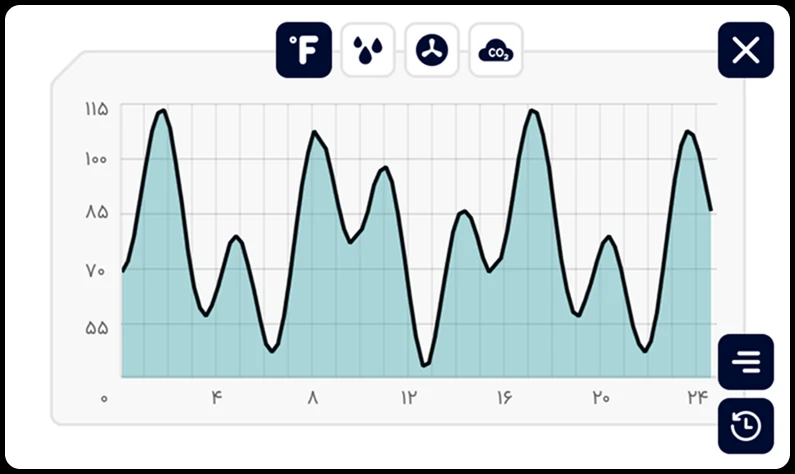
نمای شماتیک وضعیت لحظهای تمام اجزای دستگاه.
نکات ایمنی و نگهداری
پیش از روشنکردن دستگاه، این بخش را کامل مطالعه کنید.
⚠ WARNING
- آژیر مورد استفاده حتماً باید از نوع AC باشد.
- خروجیهای کنترل هیتر و فن دارای قابلیت اندازهگیری جریان هستند؛ به بار نامتناسب حساساند.
- از سیم با سطح مقطع مناسب و متناسب با جریان هر خروجی استفاده شود.
- هرگز برد کنترلر را در حالی که به برق وصل است دستکاری نکنید.
- در صورت مشاهده هرگونه بوی سوختگی یا دود، فوراً برق دستگاه را قطع کنید.
چکلیست نصب
- بررسی صحت اتصالات برق AC و DC
- بررسی محکم بودن تمامی ترمینالها
- اطمینان از اتصال صحیح سنسورهای دما و رطوبت
- تست عملکرد آژیر AC
- بررسی عملکرد صفحه نمایش
- کالیبراسیون سنسورها
- تست هیترها و فن در حالت دستی
نگهداری دورهای
بررسی و سفتکردن تمامی ترمینالها.
تمیز کردن برد و ماژولها با هوای فشرده.
کالیبراسیون مجدد سنسورهای دما و رطوبت.
بررسی عملکرد هیترها و فن بهصورت دورهای.